
Robotics Competition
Even if it isn't the biggest association at EPFL, the robotics competition is the project that teached me the most yet. It is the most complete project I have done so far, from the design to the manufacturing, including the programming and the testing. It is a project that I am really proud of, and that I will never forget. It has some budget management, time management, and team management. It was very rewarding because it was the first time I used the prototyping area at EPFL and learned to prototype even more efficiently.
During this competition with my 2 mates, we had to collect the most duplos possible in a certain area. We started from the ground up, with 2000 CHF. It was the first year the competition was this format, only keeping the point system from the other years. I designed the mechanical part, specifically the flexible and complex parts of the robot like the collection system and the wheels, both made out of FLEX TPU, some flexible filament. My mate Adrien did the other mechanical parts, while I was doing the high level programming, along side the last group member Noah who was doing the low level programming. Essentially my work was to make the main FSM (Finite State Machine) and the path planning, but most importantly the duplo machine learning algorithm, and the localisation algorithm. I generated a sythetic dataset of 12 000 images to train the machine learning algorithm, made with assemblies of parametric duplos that I modeled.
Project overview
The final presentation video that showcases the project
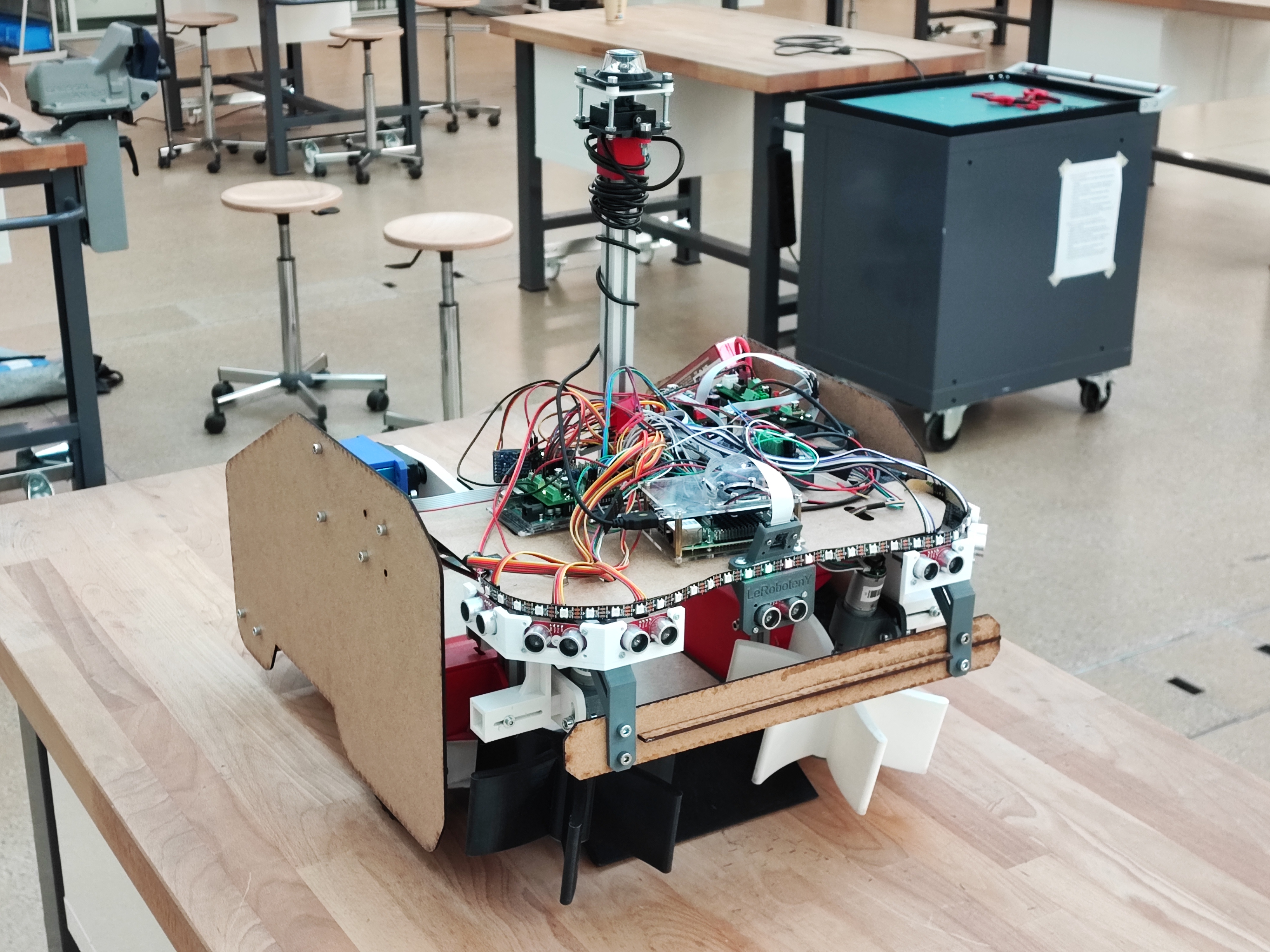
Full robot
Finished robot, with all the electronics and mechanical components
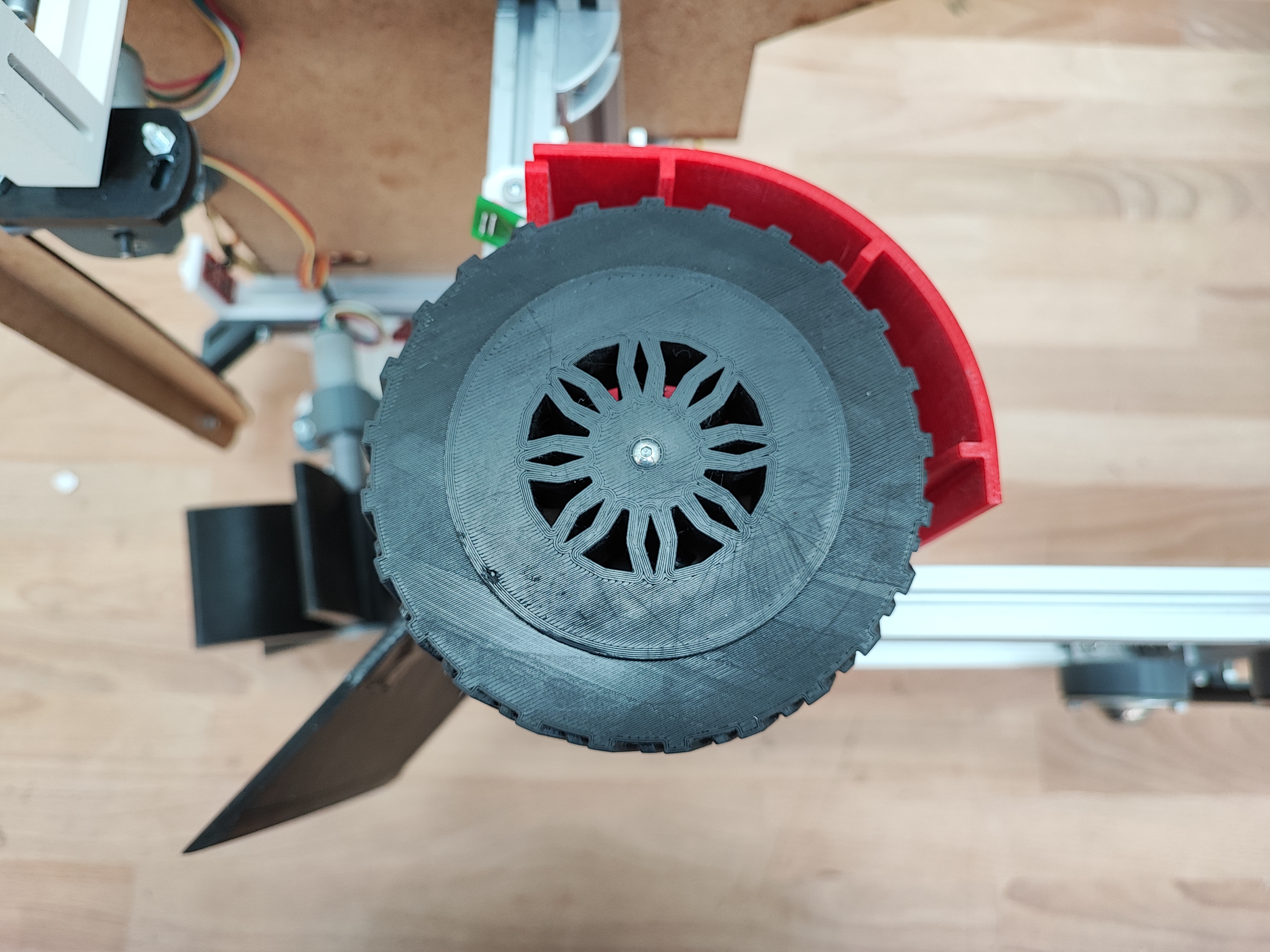
Wheels
The 3D printed wheels and rims, with brass self machined inserts
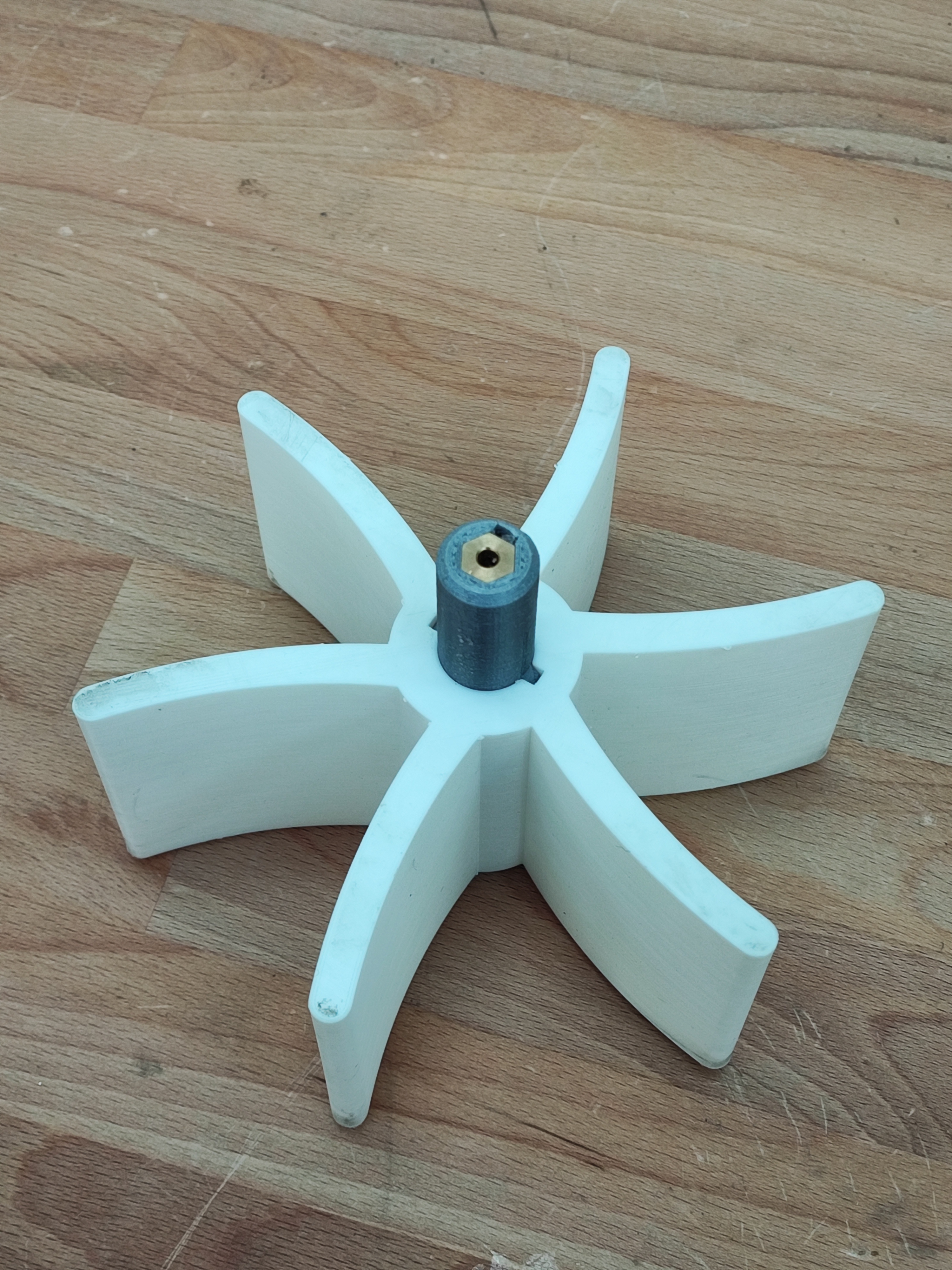
Brush
Final brush, 3d printed FLEX filament and machine brass insert

Vision
My vision algorith during the actual competition detecting the 3 duplos
Parametric duplo
CAD modeled parametric duplo
Localisation vision
Localisation used 4 beacons a 360 camera and a complex vision and trigonometry algorithm to calculate the position of the robot

Dataset image
Example image of the generated dataset I made
Color theory
Color theory we used to detect the 4 neons in the arena